

Lithium battery application example | Hikvision robot 3D vision solution
2022-12-26 15:21
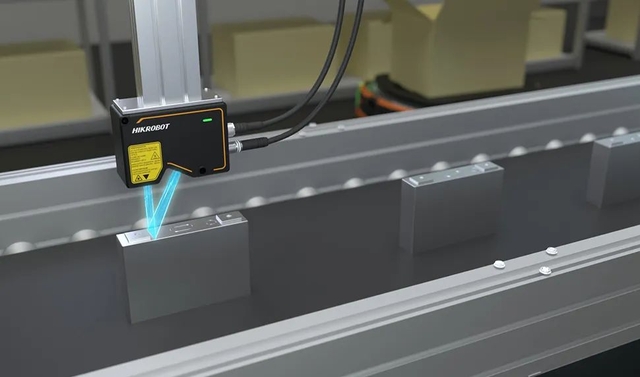
With the vigorous development of new energy vehicles, the production quality of lithium batteries has also attracted much attention. The production process is complex and changeable. From pole piece manufacturing to battery cell manufacturing to battery assembly, more efficient and smarter machine vision is required. Detection Technology. After long-term accumulation of hardware technology and breakthroughs in software platforms, Hikrobot has launched a complete set of solutions for 3D defect detection and high-precision measurement in the middle and back stages of the lithium battery industry, providing users with better choices.
▍Effect Through the height defects in the point cloud data, it can effectively intercept the detection of explosion points, pits, broken welds, poor welds and flanging heights
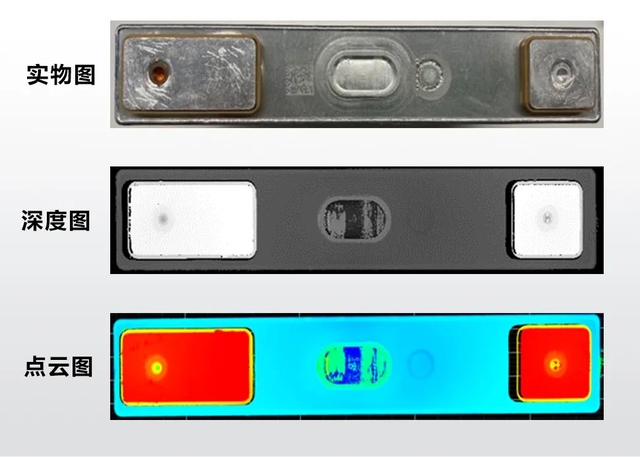
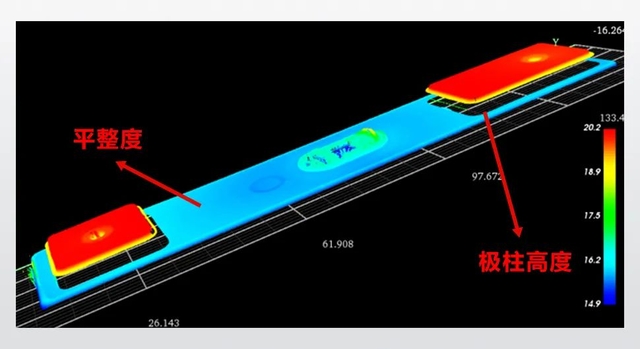
04 Top Cover Dimensions Measurement▍Demand
Detect the flatness, length and width of the lithium battery top cover
Detect the height, flatness and coplanarity of positive and negative poles
▍
Challenging detection cycle and high precision requirements
The surface of the lithium battery is reflective, which affects the imaging stability
▍
Solution: MV-DP2060-01H+VM 3D algorithm platform
▍The effect is processed by camera scanning imaging and VM algorithm to accurately measure the size of the lithium battery top cover
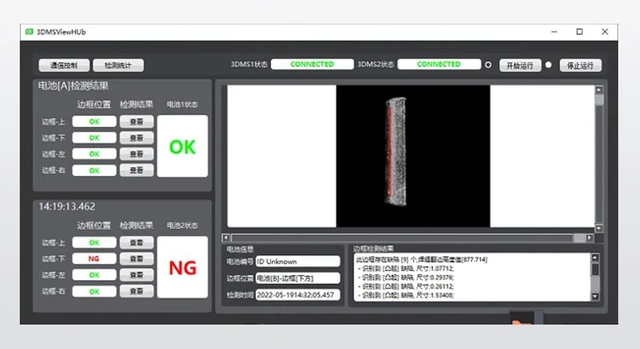
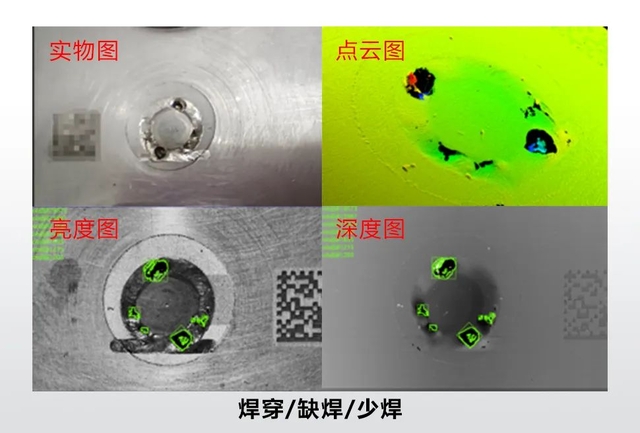
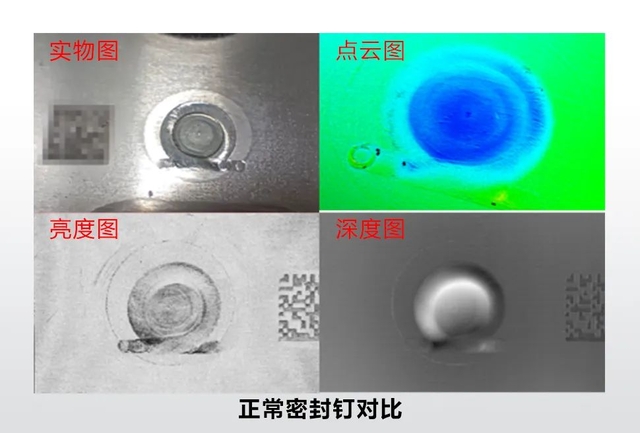
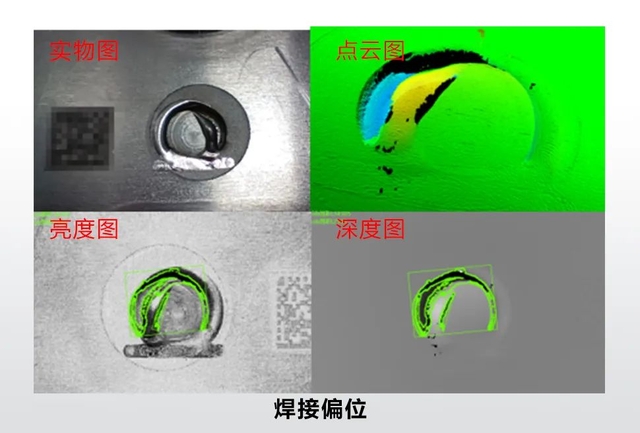
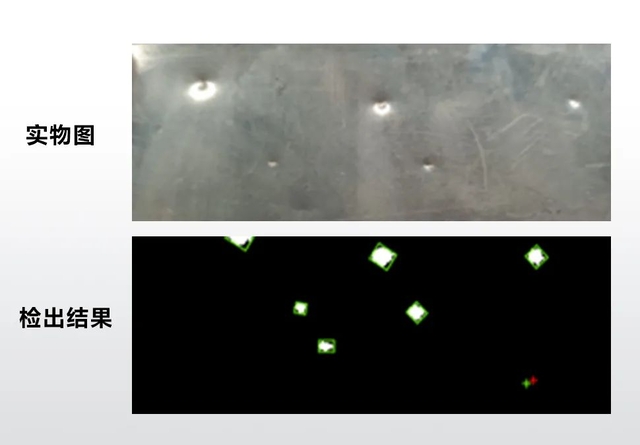
05 Sealing Nail Welding Defect Inspection▍Demand
Scan the weld marks after welding the sealing nails to detect whether there are blast holes, broken welds, pinholes, virtual welds, etc.
Check whether the sealing ring is deflected
▍Challenge
Sealing nail welding defects have rich shapes, and it is difficult to define their shape edges
There is dust and dirt in the sealing ring, which interferes with the imaging effect
▍Scheme: MV-DP2060-01H+VM 3D Algorithm Platform
▍Effect
Use the image enhancement module to preprocess the depth map of the sealing nail, and then effectively identify the welding defects of the sealing nail through the filter difference
Swipe to see more detection results
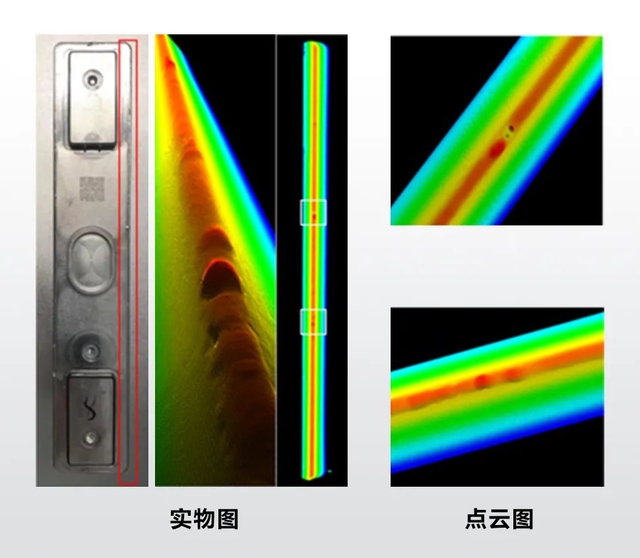
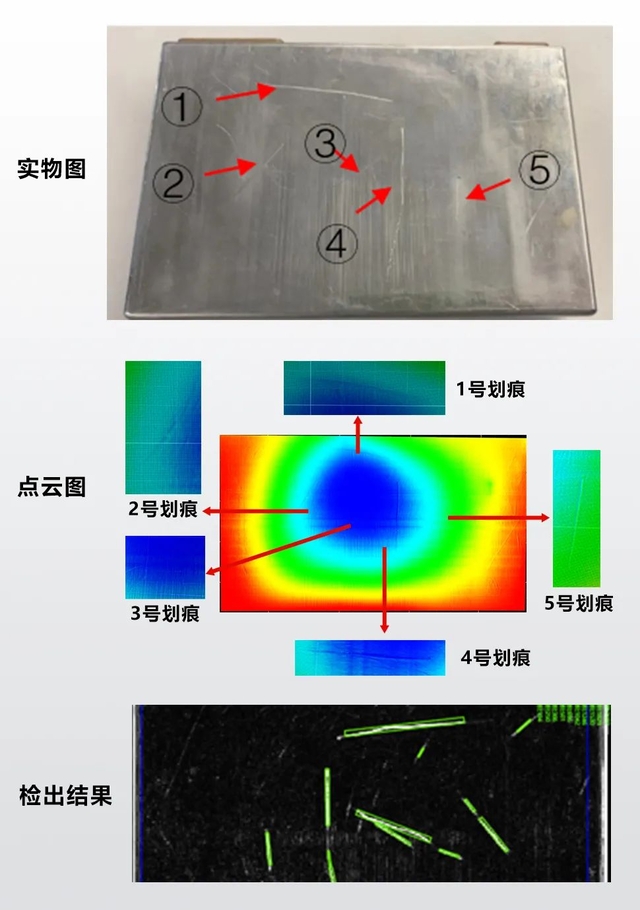
06 Requirements for front scratch detection of prismatic battery film
Detect pits and protrusions with a diameter of 0.3mm and a height of 0.1mm or more on the battery case
Detect scratches with a length of 10mm, a width of 1mm, and a depth of more than 0.05mm
▍Challenge
There are many types of scratches, and thin and deep scratches and pinhole defects are easy to miss
Misjudgment of scratches on the surface of the shell
▍Scheme: MV-DP2120-01H+VM 3D algorithm platform (AI+3D detection)
▍Effect
Through AI training and 3D depth detection in the VM 3D algorithm platform, quickly and accurately identify shell surface defects
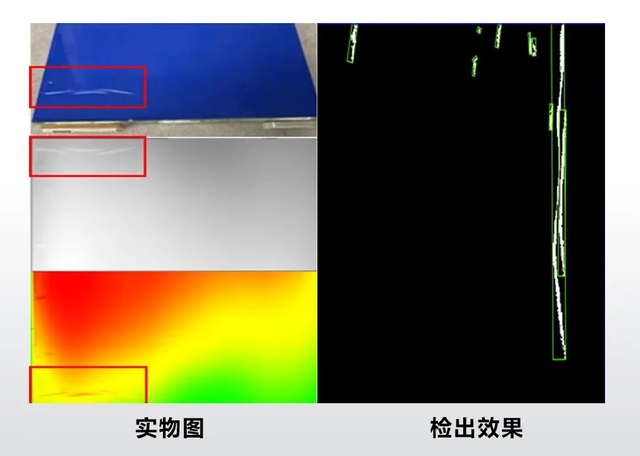
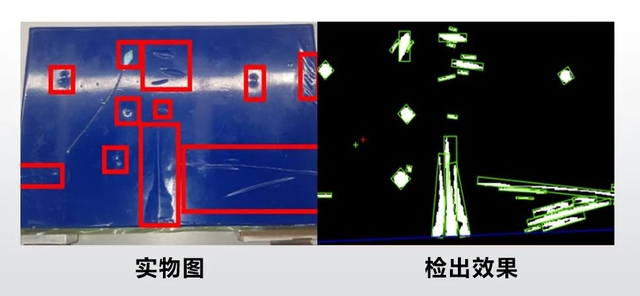
07 Detection of bulge after coating of prismatic battery
▍
After the battery is coated with blue film, it is required to detect the bubbles with a diameter greater than 2mm formed on the surface of the blue film
Uneven/cracked/dirty/frayed envelope edges
▍
Challenging the optical characteristics of the blue film itself, the defect characteristics are not obvious
There are many types of defects and it is difficult to collect samples of some defect types
▍
Solution: MV-DP2120-01H+VM 3D algorithm platform
▍
Effectively identify defects such as bulges, breakages, and folds after the capsule through the height information difference in the depth map
Contact Information
Company Address:
No. 89, Fuji Road, Tongli Town, Wujiang District, Suzhou City, Jiangsu Province
Tel:
Manager Zhang: